Článek je věnován návrhu a seřízení konvenčních regulátorů metodou přímé syntézy a metodou vnitřního modelu. Obě tyto metody v současnosti patří mezi nejčastěji používané a oblíbené přístupy, což vyplývá jak z jejich jednoduchosti, tak i obecnosti. Je ukázáno, že při určitých podmínkách jsou obě metody ekvivalentní. Jejich použití při návrhu analogových i číslicových konvenčních regulátorů je podrobně popsáno a ilustrováno na metodě požadovaného modelu, která byla rozpracována na katedře automatizační techniky a řízení Fakulty strojní VŠB — Technické univerzity Ostrava.
Klíčová slova: PID, návrh regulátorů, přímá syntéza, metoda vnitřního modelu, metoda požadovaného modelu
The article is devoted to conventional controller design and tuning by the direct synthesis method and IMC method. Both these methods belong among the most frequently and popular approaches at present, because of their simplicity and universality. It is shown that for certain conditions both methods are equivalent. Their use for analog and digital conventional controller design is described in detail and illustrated by the desired model method, which was developed at the Department of Control Systems and Instrumentation of the Faculty of Mechanical Engineering VŠB — Technical University of Ostrava.
Keywords: PID, controller design, direct synthesis, IMC method, desired model method
Konvenční regulátory typu PID podle [Aström, Hägglund, 1995; Aström, Hägglund, 2006; O’Dwyer, 2006] jsou použity ve více než 95 % regulačních obvodů pracujících v průmyslu. Prakticky většinou se jedná o regulátory typu PI. Více než 80 % těchto regulačních obvodů je špatně seřízeno [O’Dwyer, 2006]. Je proto zřejmé, že návrhu odpovídajících regulátorů a jejich seřizování je třeba věnovat náležitou pozornost.
Článek popisuje dva přístupy, které využívají obecných principů inverze dynamiky a které jsou často v literatuře nazývány jako přístupy založené na modelu [Ogunnaike, Ray, 1994]. V těchto přístupech se předpokládá, že model regulované soustavy je známý a že model regulačního obvodu je zadán, příp. vhodně zvolen.
První přístup vychází z jednoduchého regulačního obvodu a nazývá se metodou přímé syntézy a druhý vychází z rozvětveného regulačního obvodu s vnitřním modelem a nazývá se metodou vnitřního modelu. Budou uvažovány pouze konvenční regulátory.
Je uvažován jednoduchý regulační obvod na obr. 1, kde GR je přenos regulátoru, GSGD přenos regulované soustavy, W — obraz žádané veličiny, Y — obraz regulované veličiny, V — obraz poruchové veličiny. Jako nezávislou proměnnou je třeba u spojitých regulačních obvodů uvažovat komplexní proměnnou s a u diskrétních (číslicových) komplexní proměnnou z.
Obr. 1 — Jednoduchý regulační obvod
Předpokládá se, že regulovaná soustava je stabilní a že se skládá z invertibilní části s přenosem GS a neinvertibilní části s přenosem GD, která je nejčastěji reprezentována dopravním zpožděním (|GD| = 1).
Cíl regulace může být vyjádřen jednoduchým vztahem
![]() ,
(1)
,
(1)
ze kterého vyplývá dvojí úkol regulátoru, a to zajistit sledování žádané veličiny W regulovanou veličinou Y při současném potlačení negativního vlivu poruchy V na práci regulačního obvodu. Je samozřejmé, že přitom regulační obvod musí být stabilní a cíl regulace (1) musí být plněn se zadanou kvalitou.
Pro regulační obvod na obr. 1 platí
![]() ,
(2)
,
(2)
![]() ,
(3)
,
(3)
![]() ,
(4)
,
(4)
kde
![]() je přenos řízení,
je přenos řízení,
![]() — přenos poruchy. Hvězdičkou * budou dále označovány hodnoty požadované, doporučované,
příp. optimální.
— přenos poruchy. Hvězdičkou * budou dále označovány hodnoty požadované, doporučované,
příp. optimální.
Vzhledem k existenci neinvertibilní části GD, cíl regulace (1) bude plněn, bude-li platit [Šulc, Vítečková, 2004; Vítečková, 2007]
![]() .
(5)
.
(5)
Při neexistenci neinvertibilní části, tj. GD = 1, podmínky (5) se zjednoduší
![]() .
(6)
.
(6)
Protože platí (4), je zřejmé, že bude-li ve vztazích (5), resp.
(6) splněna podmínka pro přenos řízení
![]() ,
pak automaticky bude splněna i odpovídající podmínka pro přenos poruchy
,
pak automaticky bude splněna i odpovídající podmínka pro přenos poruchy
![]() .
Proto dále bude uvažován pouze přenos řízení
.
Proto dále bude uvažován pouze přenos řízení
![]() .
.
Na základě vztahu (3) lze určit přenos regulátoru
 ,
(7)
,
(7)
který zajistí požadovaný přenos řízení
![]() .
.
Rovnice (7) se nazývá rovnice syntézy a slouží k návrhu regulátorů přímou syntézou.
Vzhledem k tomu, že neinvertibilní části GD se nelze zbavit, předpokládá se požadovaný přenos řízení ve tvaru
![]() ,
(8)
,
(8)
kde Gwy je invertibilní část požadovaného přenosu řízení nejčastěji ve tvaru proporcionálního členu se setrvačností prvního nebo druhého řádu.
Právě částí Gwy se požadovaný přenos řízení (8) liší od „ideálního“ přenosu řízení
![]() ,
(9)
,
(9)
viz (5), resp. (6) pro GD = 1.
Po dosazení (8) do (7) se dostane
 .
(10)
.
(10)
Ze vztahu (10) vyplývá, že požadovaný přenos řízení
![]() musí být vhodně zvolen a přenos invertibilní části GS i neinvertibilní
části GD regulované soustavy vhodně upraven tak, aby výsledný
přenos regulátoru GR byl fyzikálně realizovatelný a konvenční
(tab. 1).
musí být vhodně zvolen a přenos invertibilní části GS i neinvertibilní
části GD regulované soustavy vhodně upraven tak, aby výsledný
přenos regulátoru GR byl fyzikálně realizovatelný a konvenční
(tab. 1).
To jsou nevýhody přímé syntézy, ale z druhé strany, je to metoda názorná a velmi jednoduchá.
Tab. 1 — Přenosy konvenčních regulátorů
|
Typ regulátoru |
Analogový regulátor |
Číslicový regulátor |
|
P |
kP |
kP |
|
PI (PS) |
|
|
|
PD |
|
|
|
PID (PSD) |
|
|
Metodou přímé syntézy je třeba navrhnout vhodný konvenční regulátor pro regulovanou soustavu s přenosem
![]() .
(11)
.
(11)
Z přenosu regulované soustavy (11) vyplývá, že GD(s) = 1, a proto pro zvolený požadovaný přenos řízení
![]() (12)
(12)
se po dosazení do (10) dostane konvenční analogový regulátor PI
 ,
,
![]() ,
,
![]() .
(13)
.
(13)
Časová konstanta Tw regulačního obvodu slouží jako „ladicí“ parametr, kterým je možno regulační pochod doladit s ohledem např. na omezení akční veličiny, dobu regulace atd.
Na obr. 2 jsou ukázány odezvy regulované veličiny y(t) na jednotkové skokové změny polohy žádané veličiny w(t) pro k1 = 1, T1 = 5 s a Tw = 1, 2 a 3 s.
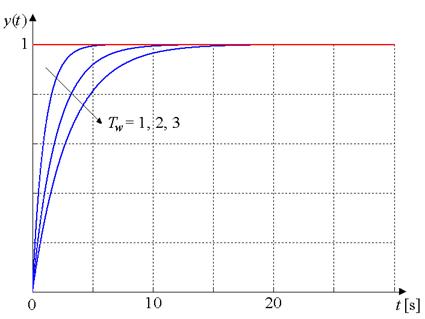
Obr. 2 — Přechodové charakteristiky regulačního obvodu — příklad 1
Regulovaná soustava má přenos
![]() .
(14)
.
(14)
Přímou syntézou je třeba navrhnout vhodný regulátor.
Z (14) vyplývá, že regulovaná soustava má invertibilní i neinvertibilní část
![]() ,
,
![]() .
(15)
.
(15)
Pro požadovaný přenos řízení ve tvaru
![]() (16)
(16)
se po dosazení (15) a (16) do (10) dostane
![]() .
(17)
.
(17)
Použitím aproximace
![]() (18)
(18)
lze přenos (17) upravit na tvar odpovídající konvenčnímu regulátoru PI
 ,
(19a)
,
(19a)
![]() ,
,
![]() .
(19b)
.
(19b)
Rovněž zde časová konstanta Tw má význam „ladicího“ parametru, který v tomto případě má vliv nejenom na rychlost a překmit odezvy, ale i na robustnost celého regulačního obvodu. Jako výchozí hodnotu je vhodné volit Tw = Td [Vítečková, Víteček, 2007].
Odezvy regulované veličiny y(t) na jednotkové skokové změny polohy žádané veličiny w(t) pro k1 = 1, T1 = Td = 5 s a Tw = 3, 5 a 7 s jsou na obr. 3a.
a) b)
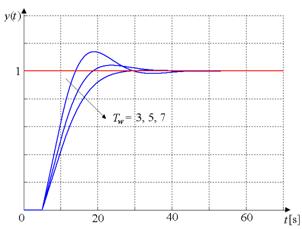
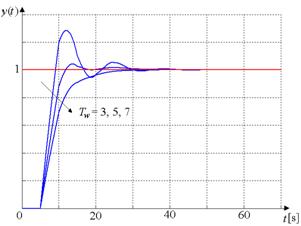
Obr. 3 — Přechodové charakteristiky regulačního obvodu z příkladu
2:
a) pro regulátor PI, b) pro regulátor PID
Použije-li se úprava přenosu regulované soustavy (14) na tvar
 ,
(20)
,
(20)
tj.
 ,
(21)
,
(21)
pak po dosazení (16) a (21) do (10) se dostane
 .
(22)
.
(22)
Použitím aproximace (18) se obdrží přenos odpovídající regulátoru PID
 ,
(23a)
,
(23a)
 ,
,
![]() ,
,
 .
(24b)
.
(24b)
Další možné úpravy a aproximace jsou uvedeny v [Vítečková, Víteček, 2007].
Odezvy regulované veličiny y(t) na jednotkové skokové změny polohy žádané veličiny w(t) pro k1 = 1, T1 = Td = 5 s a Tw = 3, 5 a 7 s jsou na obr. 3b.
Ze srovnání průběhů regulované veličiny y(t) na obr. 3 je zřejmé, že regulátor typu PID dává rychlejší odezvy než regulátor typu PI.
Na obr. 4 je rozvětvený regulační obvod s vnitřním modelem, kde
![]() je přenos regulátoru regulačního obvodu s vnitřním modelem (krátce — přenos regulátoru
IMC), GF — přenos filtru, GSM — přenos modelu
invertibilní části GS, GDM — přenos modelu neinvertibilní
části GD.
je přenos regulátoru regulačního obvodu s vnitřním modelem (krátce — přenos regulátoru
IMC), GF — přenos filtru, GSM — přenos modelu
invertibilní části GS, GDM — přenos modelu neinvertibilní
části GD.
Obr. 4 — Regulační obvod s vnitřním modelem
Anglická zkratka IMC znamená řízení s vnitřním modelem (Internal Model Control).
Pokud vnitřní model bude ideálně shodný s regulovanou soustavou, tj.
![]() a
a
![]() ,
(25)
,
(25)
pak regulační obvod s vnitřním modelem může být transformován na schéma na obr. 5, ze kterého je zřejmé, že rozvětvení slouží především k identifikaci poruchy V.
Obr. 5 — Transformovaný regulační obvod s vnitřním modelem při splnění podmínky (25)
Pro obvod na obr. 5 platí [viz (2)]
![]() ,
(26)
,
(26)
![]() ,
(27)
,
(27)
![]() .
(28)
.
(28)
I v tomto případě vzhledem k platnosti (28) bude dále uvažován pouze
přenos řízení
![]() .
.
Aby byl splněn cíl regulace (1) musí platit podmínky (5), resp. (6) pro GD = 1.
Je zřejmé, že tyto podmínky budou splněny pro
![]() (29)
(29)
a
![]() .
(30)
.
(30)
Protože část GS je stabilní a invertibilní, teoreticky lze její inverzi provést, ale to neznamená, že ji lze fyzikálně realizovat. Právě vhodně zvolený filtr umožňuje fyzikální realizaci členu o přenosu
![]() .
(31)
.
(31)
Po dosazení (31) do (27) se dostane výsledný přenos řízení regulačního obvodu s vnitřním modelem
![]() .
(32)
.
(32)
Ze srovnání vztahů (32) a (8) vyplývá, že filtr GF plní v regulačním obvodě s vnitřním modelem (obr. 4) podobnou funkci jako část přenosu řízení Gwy v jednoduchém regulačním obvodě (obr. 1).
Aby bylo možné metodou vnitřního modelu navrhnout konvenční regulátor, je třeba rozvětvený regulační obvod s vnitřním modelem na obr. 4 transformovat na ekvivalentní jednoduchý regulační obvod na obr. 1. Lze toho dosáhnout jednoduchou úpravou schématu z obr. 4 ukázanou na obr. 6.
Obr. 6 — Regulační obvod s vnitřním modelem transformovaný na jednoduchý regulační obvod
Na základě obr. 6 je již možné určit odpovídající přenos regulátoru v jednoduchém regulačním obvodě
![]() .
(33)
.
(33)
Při ideální shodě vnitřního modelu s regulovanou soustavou, tj. při splnění podmínek (25) a platnosti (31) se obdrží vztah pro přenos regulátoru v jednoduchém regulačním obvodě
![]() .
(34)
.
(34)
Ze srovnání vztahů (34) a (10) vyplývá, že pro
![]() (35)
(35)
metoda vnitřního modelu i metoda přímé syntézy vedou na stejný regulátor v jednoduchém regulačním obvodě. Tzn. že při návrhu konvenčních regulátorů obě metody jsou ekvivalentní a v podstatě při splnění podmínky (35) nerozlišitelné. Z toho důvodu i pro metodu vnitřního modelu platí při návrhu konvenčního regulátoru stejná omezení jako pro metodu přímé syntézy.
Ve skutečnosti obě metody jsou značně obecnější, než je uvedeno v tomto článku omezujícího se pouze na konvenční regulátory [Chen, Seborg, 2002; Jung, Song, Hyun, 1999b; Rivera, Morari, Skogestad, 1986; Rivera, 1995; Wang, Hang, Yang, 2001; Vítečková, 2006]. Jak metoda přímé syntézy, tak i metoda vnitřního modelu mohou být použity i pro nestabilní regulované soustavy [Jung, Song, Hyun, 1999a; Tan, Marquez, Chen, 2003]. Metoda vnitřního modelu umožňuje snadněji zajistit robustnost regulačního obvodu [Rivera, Morari, Skogestad, 1986; Rivera, 1995].
Metoda požadovaného modelu (dříve též nazývaná metoda inverze dynamiky) je původní metoda, která byla navržena, rozpracována a ověřena na katedře automatizační techniky a řízení FS VŠB — TU Ostrava [Vítečková, 1992; Vítečková, 1996; Vítečková, 1998; Vítečková, 1999]. Je to metoda využívající přímou syntézu. V současné době je metoda požadovaného modelu rozšířena na větší počet různých regulovaných soustav [Vítečková, Víteček, 2007], zde je uvedena v základní podobě.
Předpokládá se, že požadovaný přenos řízení regulačního obvodu s analogovým regulátorem (odtud název metody) má tvar anizochronního modelu [Zítek, Víteček, 1999]
![]() ,
(36)
,
(36)
tj.
![]() ,
(37)
,
(37)
kde a je zesílení otevřeného regulačního obvodu.
Zvolený tvar požadovaného přenosu řízení (36) je nejjednodušší tvar, který umožňuje volbou zesílení otevřeného regulačního obvodu a dosáhnout různých průběhů odezev od aperiodických až po kmitavé, viz obr. 7.
Na rozdíl od obvyklých postupů v metodách přímé syntézy a vnitřního modelu požadovaný přenos řízení (36) má tvar, který pro vhodné přenosy regulovaných soustav vede přímo na přenosy konvenčních regulátorů. Nevystupuje zde nutnost aproximace dopravního zpoždění v přenosu regulátoru, a proto je zde také dosaženo vyšší přesnosti pro různé hodnoty zesílení otevřeného regulačního obvodu a.
Zesílení otevřeného regulačního obvodu a zajišťující požadovaný relativní překmit ? může být přibližně určeno analyticky za předpokladu dominantnosti dvojice pólů charakteristického kvazimnohočlenu požadovaného přenosu řízení (36)
![]() (38)
(38)
a jejího srovnání s odpovídající dvojicí pólů proporcionálního kmitavého členu 2. řádu nebo číslicovou simulací. Rozdíl mezi analytickým a simulačním řešením pro relativní překmit ? od 0 do 0,5 (od 0 do 50%) nepřekračuje 2 % [Vítečková, 1996].
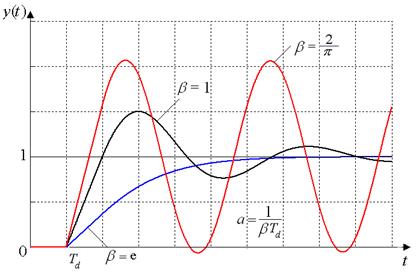
Obr. 7 — Přechodové charakteristiky regulačního obvodu s požadovaným přenosem řízení (36) pro různé hodnoty a (ß)
Hodnoty koeficientu ß pro výpočet zesílení otevřeného regulačního obvodu a ze vztahu
![]() (39)
(39)
pro požadovaný relativní překmit ? upřesněné simulačně jsou uvedeny v tab. 2.
Tab. 2 — Hodnoty koeficientů a a b pro požadovaný relativním překmit ?
|
0 |
0,05 |
0,10 |
0,15 |
0,20 |
0,25 |
0,30 |
0,35 |
0,40 |
0,45 |
0,50 |
|
|
1,282 |
0,984 |
0,884 |
0,832 |
0,763 |
0,697 |
0,669 |
0,640 |
0,618 |
0,599 |
0,577 |
|
|
2,718 |
1,944 |
1,720 |
1,561 |
1,437 |
1,337 |
1,248 |
1,172 |
1,104 |
1,045 |
0,992 |
Postup při návrhu a seřízení konvenčních analogových regulátorů metodou požadovaného modelu je ukázán v příkladě 3. Podobným způsobem byly získány všechny vztahy v tab. 3 (pro T = 0).
Pro regulovanou soustavu s přenosem
![]() (40)
(40)
je třeba navrhnout vhodný konvenční analogový regulátor a seřídit ho tak, aby při skokové změně polohy žádané veličiny w(t) byl zajištěn přibližně mezní aperiodický regulační pochod.
Z přenosu regulované soustavy (40) je zřejmé, že
![]() .
(41)
.
(41)
Po dosazení (41) a (37) do (10) a úpravě se dostane přenos PID regulátoru
 (42)
(42)
se stavitelnými parametry (viz tab. 3, řádek 4 pro T = 0)
![]() .
(43)
.
(43)
Hodnota zesílení otevřeného regulačního obvodu a*
zajišťující přibližně mezní aperiodický průběh se určí za předpokladu dominantnosti
stabilního dvojnásobného reálného pólu
![]() ,
který se určí ze soustavy rovnic
,
který se určí ze soustavy rovnic
![]() ,
,
![]() .
(44)
.
(44)
Řešením (44) pro charakteristický kvazimnohočlen (38) se dostane
![]() ,
(45a)
,
(45a)
![]() .
(45b)
.
(45b)
Ze srovnání vztahů (45b) a (39) je zřejmé, že pro mezní aperiodický
průběh, tj. pro ? = 0 hodnota koeficientu ß = e
![]() 2,718. Je to stejná hodnota, jako je uvedena v tab. 2.
2,718. Je to stejná hodnota, jako je uvedena v tab. 2.
Získané výsledky platí i pro případ T1 = T2 [Vítečková, 1996].
Odezva na skokovou změnu polohy žádané veličiny pro k1 = 1, T1 = Td = 10 s a T2 = 5 s je ukázána na obr. 8.
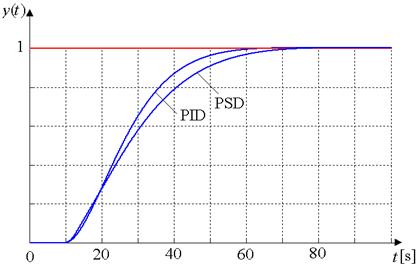
Obr. 8 — Přechodové charakteristiky regulačního obvodu s analogovým
PID
a číslicovým PSD regulátorem seřízeným metodou požadovaného modelu
pro
? = 0 — příklady 3 a 4
Tab. 3 — Hodnoty stavitelných parametrů regulátoru pro metodu požadovaného modelu
regulovaná soustava |
regulátor |
< |
Analogový T = 0 číslicový T > 0 |
||||
|
TYP |
|
|
|
||||
|
1 |
|
P |
|
— |
— |
||
|
2 |
|
PI (PS) |
|
|
— |
||
|
3 |
|
PD |
|
— |
|
||
|
4 |
|
PID (PSD) |
|
|
|
||
|
5 |
0,5 <
|
PID (PSD) |
|
|
|
||
Předpokládá se, že požadovaný přenos řízení regulačního obvodu s číslicovým regulátorem má tvar
![]() ,
(46)
,
(46)
tj.
![]() ,
(47)
,
(47)
kde d je diskrétní relativní dopravní zpoždění (pro jednoduchost se předpokládá celé číslo), T — vzorkovací perioda.
Dále se rovněž předpokládá, že kvantizační chyba je zanedbatelně malá, a proto pojmy diskrétní a číslicový jsou považovány za ekvivalentní.
Tvar požadovaného přenosu řízení regulačního obvodu s číslicovým regulátorem (46) odpovídá vlastnostmi požadovanému přenosu řízení regulačního obvodu s analogovým regulátorem (36), a proto volbou zesílení otevřeného regulačního obvodu a lze rovněž dosáhnout podobných průběhů jako na obr. 7.
Na rozdíl od regulačního obvodu s analogovým regulátorem zesílení otevřeného regulačního obvodu a zajišťující určitý překmit ? nelze kromě mezního aperiodického průběhu určit analyticky, ale pouze simulačně a lze ho vyjádřit vztahem [Vítečková, 1996]
![]() ,
(48)
,
(48)
kde ? je koeficient určený číslicovou simulací pro požadovaný relativní překmit ?, viz tab. 2.
Diskretizovaný přenos regulované soustavy GS(z)GD(z) lze za předpokladu použití vzorkovače a tvarovače nultého řádu určit na základě vztahu [Vítečková, 1992]
 ,
(49)
,
(49)
kde k je relativní diskrétní čas, Z — operátor Z-transformace, L — operátor L-transformace.
Pokud neinvertibilní část regulované soustavy GD(s) reprezentuje pouze dopravní zpoždění, tj.
![]() ,
,
pak diskretizovaný přenos regulované soustavy lze určit z jednoduššího vztahu
 .
(50)
.
(50)
Postup při návrhu a seřízení konvenčních číslicových regulátorů metodou požadovaného modelu je ukázán v příkladě 4. Podobným způsobem byly získány všechny vztahy v tab. 3 (pro T > 0).
Pro regulovanou soustavu (41) z příkladu 3 je třeba navrhnout vhodný konvenční číslicový regulátor a seřídit ho tak, aby při skokové změně polohy žádané veličiny byl zajištěn přibližně mezní aperiodický regulační pochod.
S využitím vztahů (41) a (50) se dostane diskretizovaný přenos regulované soustavy
![]() ,
(51)
,
(51)
![]() ,
(52a)
,
(52a)
![]() .
(52b)
.
(52b)
Dosazením vztahů (47) a (51) do (10) a úpravě se získá přenos
 ,
(53)
,
(53)
který je podobný přenosu konvenčního číslicového regulátoru PSD (viz tab. 1) se stavitelnými parametry
![]() ,
(54)
,
(54)
![]() ,
(55a)
,
(55a)
![]() .
(55b)
.
(55b)
Zesílení číslicového regulátoru
![]() je funkcí komplexní proměnné z a navíc při malých hodnotách vzorkovací periody
T vzniká tzv. problém „zvonicího“ pólu, protože platí
je funkcí komplexní proměnné z a navíc při malých hodnotách vzorkovací periody
T vzniká tzv. problém „zvonicího“ pólu, protože platí
![]() .
(56)
.
(56)
Zvonicí pól z1 způsobuje nepřípustnou kmitavost
akční veličiny. Oba tyto problémy lze odstranit zastoupením zesílení
![]() závislého na komplexní proměnné z konstantním zesílením
závislého na komplexní proměnné z konstantním zesílením
![]() .
(57)
.
(57)
Pro T › 0 vztahy (55) a (57) konvergují k odpovídajícím vztahům pro analogový regulátor PID (43).
Vztahy (55) nejsou příliš vhodné pro praktické používání. Použitím aproximace
 (58)
(58)
je lze snadno zjednodušit, obdrží se (viz tab. 3, řádek 4)
![]() ,
(59a)
,
(59a)
![]() .
(59b)
.
(59b)
Zbývá ještě určit zesílení otevřeného regulačního obvodu a*,
které zajistí přibližně mezní aperiodický regulační pochod. Lze ho určit za předpokladu
dominantnosti stabilního dvojnásobného reálného pólu
![]() .
Zesílení a* i pól
.
Zesílení a* i pól
![]() se získají řešením soustavy rovnic
se získají řešením soustavy rovnic
![]() ,
,
![]() ,
(60)
,
(60)
kde
![]() (61)
(61)
je charakteristický mnohočlen regulačního obvodu s číslicovým regulátorem pro metodu požadovaného modelu [je to jmenovatel požadovaného přenosu řízení (46) vynásobený zd].
Řešením (60) pro (61) se získá
![]() ,
(62)
,
(62)
![]() .
(63)
.
(63)
Pro zesílení otevřeného regulačního obvodu (63) je výhodné použití aproximace [Vítečková, 1996]
 ,
(64)
,
(64)
jejíž nepřesnost pro d ? 0,5 je lepší než 2 % [viz vztah (48)].
Ze vztahu (64) je zřejmé, že pro T › 0 se dostane hodnota zesílení otevřeného regulačního obvodu a* s analogovým regulátorem PID zajišťující mezní aperiodický regulační pochod, viz vztah (45b).
Všechny výsledky platí i pro případ T1 = T2 [Vítečková, 1996].
Odezva na skokovou změnu polohy žádané veličiny pro k1 = 1, T = 3, T1 = Td = 10 s a T2 = 5 s je ukázána na obr. 8. U číslicového regulátoru PSD došlo ke zpomalení odezvy.
Metoda požadovaného modelu je pro relativní překmit menší než 20 % robustní a vyhovuje všem důležitějším kritériím doporučovaným pro návrh a seřízení regulátorů [Aström, Hägglund, 1995; Aström, Hägglund, 2006; Vítečková, 1996; Vítečková, Víteček, 2007]. Proto pro úpravu přenosů regulovaných soustav mohou být použity i velmi hrubé aproximační metody, z nichž některé jsou uvedeny v [Vítečková, 1996; Vítečková, 1998]. Velmi jednoduchý je přístup využívající empirické „pravidlo poloviny“ [Skogestad, 2003; Vítečková, 2006], který bude uveden ve zjednodušené podobě.
Za předpokladu, že přenos regulované soustavy má tvar s nestabilními nulami
 ,
,
![]() ,
(65)
,
(65)
pak na základě „pravidla poloviny“ se pro náhradní přenos
![]() (66a)
(66a)
dostane
![]() ,
(66b)
,
(66b)
resp. pro přenos
![]() ,
(67a)
,
(67a)
![]() .
(67b)
.
(67b)
Metodou požadovaného modelu je třeba seřídit analogové regulátory PI a PID pro regulovanou soustavu s přenosem
![]() (68)
(68)
tak, aby relativní překmit byl okolo 5 %. Všechny časové konstanty jsou v sekundách.
Pro regulovanou soustavu (68) platí: GD(s)
= 1, k1 = 2, T10 = 10, T20
= 5,
T30 = 4, T40 = 1, ?10
= 2.
Na základě tab. 2 se pro ? = 0,05 určí koeficient ß = 1,944.
V souladu s tab. 3 (řádek 2) přenos regulované soustavy má mít tvar (66a), a proto na základě (66b) lze psát
V souladu s tab. 3 (řádek 4) přenos regulované soustavy má mít tvar (67a), a proto na základě (67b) lze psát
![]()
![]()
Odezvy na skokovou změnu polohy žádané veličiny jsou na obr. 9. V obou případech skutečný relativní překmit je okolo 9 %, tj. rozdíl mezi požadovaným a skutečným překmitem je menší než 4 %. S ohledem na velmi hrubou úpravu výchozího přenosu regulované soustavy je to výsledek velmi dobrý.
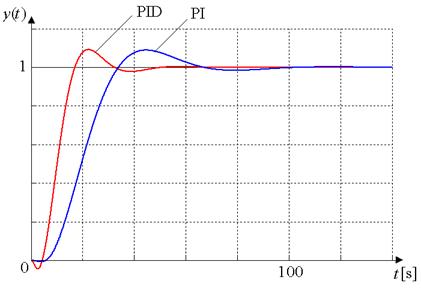
Obr. 9 — Přechodové charakteristiky regulačního obvodu s analogovými PI a PID regulátory — příklad 5
Pro zvolený požadovaný relativní překmit ? na základě tab. 2 určit koeficienty a a b a pak pro doporučený regulátor v souladu s tab. 3 vypočíst hodnoty jeho stavitelných parametrů.
Z hlediska požadovaného relativního překmitu ? metoda požadovaného modelu v případě analogových regulátorů je poměrně přesná. V případě číslicových regulátorů její nepřesnost je v průměru okolo 5 %. Je to způsobeno zjednodušením exponenciální funkce a složitých vztahů, viz příklad 4. Pokud výchozí přenos regulované soustavy je upravován, pak přesnost je samozřejmě menší.
V článku jsou stručně popsány a vysvětleny dva přístupy k návrhu a seřizování konvenčních regulátorů, a to metoda přímé syntézy a metoda vnitřního modelu. Je ukázáno, že při určitých předpokladech oba přístupy jsou ekvivalentní.
Podrobněji je v článku popsána metoda požadovaného modelu, která byla rozpracována na katedře automatizační techniky a řízení Fakulty strojní VŠB — TU Ostrava a která ilustruje použití metody přímé syntézy pro návrh a seřízení jak analogových, tak i číslicových konvenčních regulátorů.
Aktuální číslo
Odborný vědecký časopis Trilobit | © 2009 - 2026 Fakulta aplikované informatiky UTB ve Zlíně | ISSN 1804-1795