
Klíčová slova: laboratoře s dálkovým přístupem, internet, automatická regulace, identifikace, model Simulink.
Abstract: The integrated laboratories of automation are very modern and relevant. They have access locally and via the Internet too. The base builds real technical equipments. There were obtained worth experiences altogether positive. But some ones call requirements to modify or improve. The experiment of DE1 is used a thermal system with closed control loop and perfect automation and informatics equipment. It has a problem with optimal using. Therefore there are searched reasons of errors. Part of their results is a object of the paper.
Keywords: remote laboratory, the Internet, automation control, identification, modeling.
Úvod„Laboratoře integrované automatizace“ (dále jen LABI) (Hruška, 2007) jsou vybudovány jako moderní laboratoře se vzdálenými reálnými výukovými experimenty (dále jen úloha) přístupnými lokálně i dálkově přes internet. LABI slouží pro studium v předmětech souvisejících s průmyslovou automatizací a s aplikovanou informatikou. Mohou je využívat studenti i přednášející a jsou součástí globálního řešení laboratoří FAI na síti internet.
LABI mají v současné době zrealizovány úlohy DE1(regulace teploty), DE2(Teplárenská soustava), DE3(průtokoměry), DE4(řízení motoru frekvenčním měničem), DE5(fermentor), DE7/8/9 (hierarchická sestava Profibus/ASI) a DE10 (fotovoltaický panel, je dokončována instalace). Jsou to reálné sestavy technických zařízení pro provádění různých procesů, tepelných. Elektrických, chemických, ekologických). Přístup na LABI je volný a přes síť Internet je po vyvolání adresy labi.fai.utb.cz.
LABI jsou provozovány od r. 2005. Byly získány cenné zkušenosti, vesměs pozitivní. Některé zkušenosti vyvolávají požadavky na drobné úpravy nebo hledání lepší formy užití a použití ve výuce.
Příspěvek se týká úlohy DE1. U této úlohy se projevily problémy v tom, že předpoklady pro původní záměr byly jiné a úloha nedávala optimální využití.
Analýza úlohy DE1 – regulace teplotyV rámci systému LABI úloha DE1 s názvem „Regulace teploty“ je reálná sestava reálného systému s uzavřeným okruhem regulace teploty. Obsahuje regulovanou soustavu bez i s dopravním zpožděním a s rozloženými parametry a prostředky automatického řízení a informatiky. Schéma je na obr. 1.
Regulovaná soustava je vytvořena zařízením pro tepelný ohřev (E1), oběhovým čerpadlem (E2), třícestným regulačním ventilem (Y1), spotřebičem tepla-radiátorem (E3). Regulátor (U1) je kompaktní programovatelný číslicový regulátor s možností dálkového komunikace. Akčním členem je jednotka (K1) pro změny efektivní hodnoty napětí 230V/50 Hz elektrické energie.Velikost dopravního zpoždění lze nastavit změnou rychlosti proudění na čerpadle (E2) a polohou regulačního ventilu (Y1).
Obr.1: Blokové schéma úlohy DE1
Obr.2: Schéma sestavy technických prostředků úlohy DE1
Měřené veličiny na soustavě (teploty T1, T2, T3, T4, poloha ventilu Y1) jsou napojeny na vstupní stranu centrální jednotky typu PLC (typ SIMATIC S7-300) jako analogové signály.
Její výstupy ovládají analogovým výstupním signálem akční jednotky systému (spojitý regulační ventil Y1, jednotka K1 pro řízení efektivního napětí 230V/50Hz). Propojení typu PROFIBUS je mezi PLC a regulátorem.
Významná část úlohy DE1 patří prostředkům informatiky. Jejich blokové schéma je zobrazeno na schématu 2.
Funkce úlohy DE1
Uživatel po zvolení úlohy DE1 a po přihlášení se dále rozhodne, zda bude provádět práci na DE1 v režimu:
režim I: provádění identifikace regulované soustavy
režim A: zapojení uzavřeného regulačního okruhu s automatickou regulací volené teploty v systému s dopravním zpožděním a s rozloženými parametry.
Režim I umožní měřit data pro provedení experimentální identifikace. Po zadání parametrů se spustí úloha provedením skokové změny. Systém automaticky archivuje naměřená data. Pro režim I se zadává: velikost příkonu pro ohřev v rozsahu 5-30%, poloha nastavení ventilu v rozsahu 5-100%, doba trvání identifikace v rozsahu 1-180 min.
Režim A se týká provedení automatické regulace. Zadává se:
Nastavená a naměřená data jsou uložena v souboru, který lze stáhnout a zpracovat v prostředí EXCEL na individuální vyhodnocení.
Problémy s užitím úlohy DE1
Projektový záměr pro úlohu DE1 byl dálkově po síti Internet provést nejdříve identifikaci soustavy, pak vypočítat podle výsledků identifikace optimální konstanty regulátoru a ověřit si jejich platnost v režimu experimentu automatické regulace pro zadanou žádanou hodnotu regulované veličiny. Výukovým aspektem je aplikace znalostí z teorie automatického řízení na technickém zařízení za pomoci technických prostředků automatizace a informatiky.
Po zprovoznění úlohy DE1 se objevily tyto problémy:
pro režim identifikace i automatiky se jeví velký výkon ohřevu (velká strmost ohřevu), následně vypínání pochodu při Tmax, krátká doba trvání identifikaci pro max. 45 minut,
průběhy u režimu automatika jsou vesměs kmitavé, nelze najít žádnou metodou optimální konstanty regulátoru.
Provádění experimentální identifikace
Při provádění identifikace musel uživatel nastavovat skokovou změnu vstupu do soustavu na velmi malou hodnotu, do 10%. Zařízení pro ohřev má vysoký příkon, (na nižší příkon se nevyrábí), takže ohřev byl velmi strmý a dostával se rychle do saturace. Při velmi malém nastaveném příkonu trvala doba identifikace do ustáleného stavu nad možných 45 minut. Ukázka typických průběhů identifikace je na obr. 3.
Po podrobné analýze bylo provedeno jednak omezení maximálního vstupního napětí ze 230 Vef na 1/3 hodnoty tj. cca 76 Vef. Dále bylo rozšířeno mezení doby trvání experimentu, bylo provedeno prodloužení na 180 minut. Po těchto úpravách je provádění experimentální identifikace bez problémů. Ukázka grafických průběhu experimentální identifikace po provedení úprav je na obr. 4.
Obr.3. Průběhy hodnot teplot experimentální identifikace v původním stavu
Obr.4 Průběhy hodnot teplot experimentální identifikace v upraveném stavu
Režim automatické regulace
Režim automatické regulace obsahuje krok výpočtu optimálních nastavitelných parametrů regulátoru a krok provedení regulačního pochodu.
Výpočet konstant regulátoru podle výsledků experimentální identifikace byl prováděn podle metod vyučovaných v předmětech TAŘ. Výsledky jednak ukazovaly rozdíly hodnot podle jednotlivé metody, jednak po provedení experimentů s nastavenými hodnotami podle výpočtů bylo chování regulačního pochodu nevyhovující.
Při hledání příčin byla použita simulace v systému Matlab-Simulink. Zde se rozdíly potvrdily. Ze záznamu hodnot vstupů a výstupů regulátoru vyplynulo, že regulátor se nechová jako standardní PID regulátor. Po prostudování manuálu k použitému regulátoru v soustavě bylo rozhodnuto udělat analýzu regulátoru v modelu Simulink.
Simulinkový model regulátoru Simens SIPART DR21
PID řídící algoritmus je implementován v regulátoru SIPART DR21 (Siemens, 2003) v neinteraktivním paralelním zapojení. PID regulátor je rozšířen o filtraci derivační složky, aby se zabránilo zesílení vysokofrekvenčního šumu. Řídící algoritmus PI regulátoru je dán:
a přenos derivační složky s filtrací:
kde u(t)
je akční zásah, e(t) je regulační odchylka, u0 umožňuje
volbu pracovního bodu, Kp je proporcionální zesílení, Ti
integrační časová konstanta, Tv derivační časová konstanta,
vv derivační zesílení. Parametr vv umožňuje plynule přecházet
mezi PI a PID regulátorem a pro malé hodnoty vv je derivační složka málo
významná a PID regulátor je blízký PI regulátoru. Regulační odchylka e(t)
prochází nejprve adaptivním filtrem s časovou konstantou Tf a blokem
s pásmem necitlivosti
![]() ,
zajišťujících odstranění šumu a progresivní chování regulátoru. Akční zásah regulátoru
je omezen parametry YA,YE. Regulátor umožňuje
nastavení rozsahu akční veličiny v rozsahu -10 až 110% avšak výstupní proud je vždy
kladný. Pokud akční veličina u(t) dosáhne jednoho z limitů YA
nebo YE, další integrace v integračním členu se vypne. Tím
se zabrání unášení integrační složky (Integrátor Windup) a při změně polarity regulační
odchylky se ihned mění i akční zásah. Vnitřní zapojení regulačního obvodu je znázorněno
na Obr. 5 (podle Siemens,2003). Na výstupu akční zásah prochází ještě filtrem s
časovými konstantami TP,TM, který zabraňuje
prudkým změnám akční veličiny a snižuje opotřebení akčních členů. Časová konstanta
TP je použitá pro rostoucí akční zásah a TM
pro klesající akční zásah.
,
zajišťujících odstranění šumu a progresivní chování regulátoru. Akční zásah regulátoru
je omezen parametry YA,YE. Regulátor umožňuje
nastavení rozsahu akční veličiny v rozsahu -10 až 110% avšak výstupní proud je vždy
kladný. Pokud akční veličina u(t) dosáhne jednoho z limitů YA
nebo YE, další integrace v integračním členu se vypne. Tím
se zabrání unášení integrační složky (Integrátor Windup) a při změně polarity regulační
odchylky se ihned mění i akční zásah. Vnitřní zapojení regulačního obvodu je znázorněno
na Obr. 5 (podle Siemens,2003). Na výstupu akční zásah prochází ještě filtrem s
časovými konstantami TP,TM, který zabraňuje
prudkým změnám akční veličiny a snižuje opotřebení akčních členů. Časová konstanta
TP je použitá pro rostoucí akční zásah a TM
pro klesající akční zásah.
Schéma z Obr. 5 bylo použito pro tvorbu modelu PID regulátoru v Simulinku je na obr. 6. Adaptivní filtr s časovou konstantou Tf byl nahrazen přenosem s odpovídající časovou konstantou Tf. Výstup bloku AntiWindup, který zabraňuje unášení integrační složky je roven KpTie(t), pokud je splněna podmínka:
![]()
V ostatních
případech, kdy je akční zásah v saturaci, je roven 0. Výstupní filtr s parametry
TP,TM pro rostoucí a klesající akční zásah je
nahrazen filtrem s časovou konstantou
![]() .
.
Obr. 5 Schéma vnitřního zapojení PID regulátoru
Obr. 6 Schéma PID regulátoru SIPART DR21 v prostředí Simulink
Vytvořený simulinkový blok „Siemens SIPART DR21“ (Obr. 7) umožňuje nastavení stejných parametrů jako skutečný regulátor Siemens.
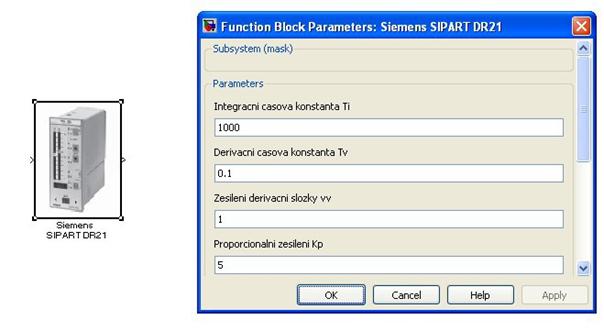
Obr. 7 Nastavení parametrů bloku Siemens SIPART DR21pro prostředí Simulink
Výsledky praktického ověřování
Po provedení některých úprav v ohřevu proudící kapaliny a v programové aplikaci (změny doby nastavení, omezení elektrického napájení ohřívací jednotky) byly výsledky analýz ověřeny na modelu DE1 prakticky.
Byla provedena nová identifikace soustavy modelu. Nastavené hodnoty jsou zřejmé z panelu nastavení na Obr. 8.
Obr. 8 Panel nastavení režimu „Identifikace“
Výsledkem experimentální identifikace vyhodnocované metodou nejmenších čtverců je přenos soustavy ve tvaru:
Přenos systému byl použit pro návrh regulátoru metodou inverze dynamiky (Šulc a Vitečková, 2009). Pro zvolený nulový překmit byly získány následující parametry PID regulátoru:
![]()
Protože vypočtená integrační časová konstanta byla vyšší než je možné do úlohy zadat, byla zvolena nejvyšší možná hodnota integrační konstanty (1000s).Regulátor byl nejdříve simulačně ověřen v Simulinku a výsledný regulační pochod je znázorněn na Obr. 11.
Obr. 9 Panel nastavení režimu „Automat“
Protože vypočtená integrační časová konstanta byla vyšší než je možné do úlohy zadat, byla zvolena nejvyšší možná zadávaná hodnota (1000s). Panel nastavení parametrů pro režim „Automat“ je na Obr. 9. Po zadání všech těchto parametrů bylo provedeno spuštění úlohy. Výsledné měření je zobrazeno na Obr. 10. Z výsledného grafu je patrné že na začátku regulace dochází k překmitu a pak nastává ustálení regulačního děje. Stejné nastavení regulátoru bylo ověřeno i simulačně (Obr. 11).
Obr. 10 Panel nastavení režimu „Automat“
Obr. 11 Ověření regulace v prostředí Simulinku
Závěr
Zpracování modelu regulátoru Siemens, typ SIPART DR21, umožnilo poznat příčiny rozdílů funkce úlohy DE1 při provádění režimu regulace a výsledků podle standardních metod syntézy regulačního obvodu. Další zlepšení funkce a zmenšení těchto rozdílů způsobily již provedené a uvedené úpravy technických prostředků úlohy DE1 a úpravy programové aplikace. V následujícím období budou ještě provedeny dílčí úpravy programového vybavení úlohy tak, aby bylo možno využít všech možností regulátoru SIPART DR21 a umožnit plné využití úlohy při výuce.
Literatura
Aktuální číslo
Odborný vědecký časopis Trilobit | © 2009 - 2026 Fakulta aplikované informatiky UTB ve Zlíně | ISSN 1804-1795